Self-assembling boats
Mechanical design and hardware for a swarm of self-reconfiguring robotic boats (MIT, 2022).
With weight as a primary constraint, permanent magnets showed superior strength compared to electromagnets in allowing the boats to latch at a reasonable distance (~10 cm). A light-weight origami-inspired mechanism was developed - with a single servo in the centre actuating magnets on all four sides of the boat. The design was broken down into small easily printable parts and strips of rubber for the flexible components.
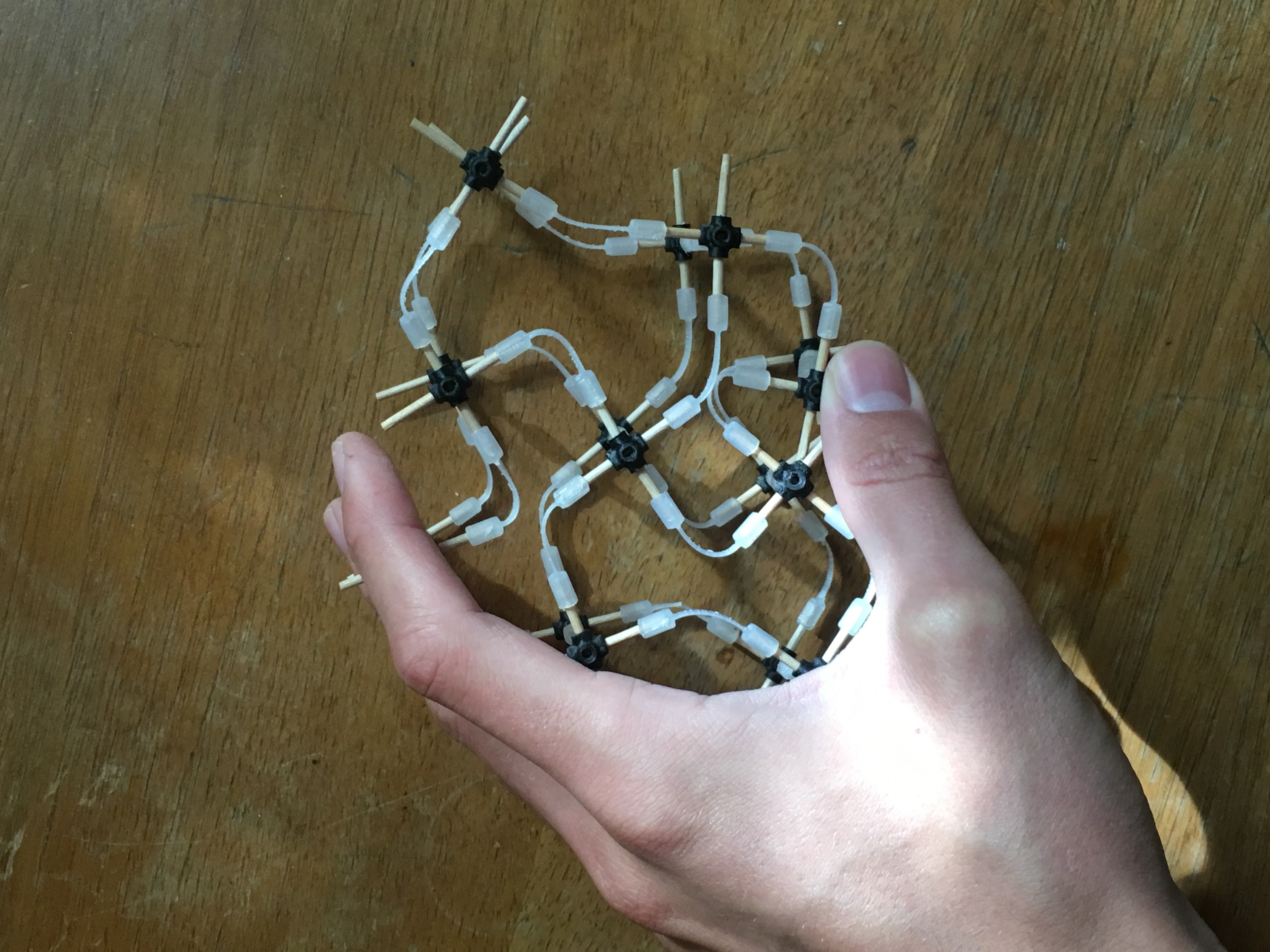
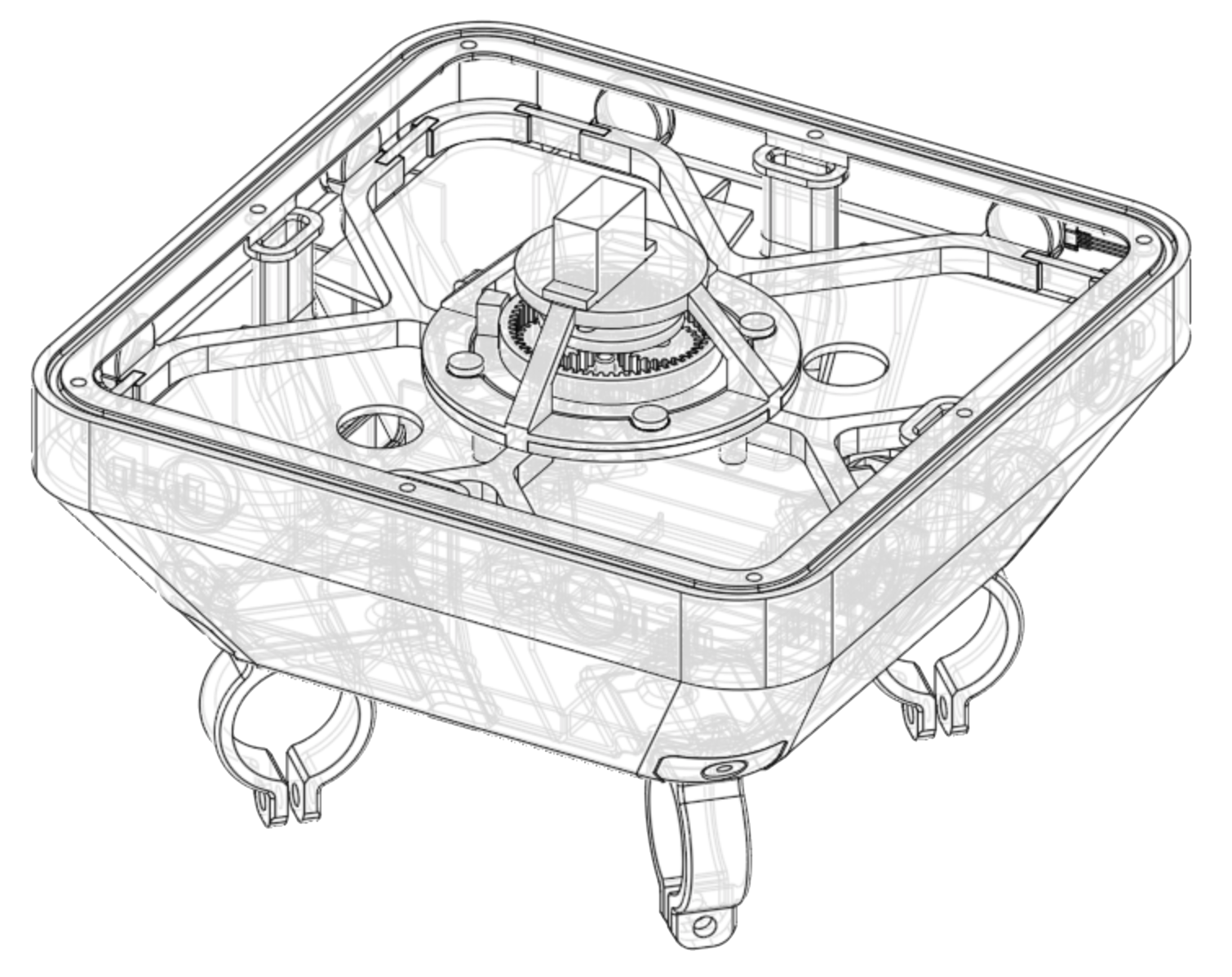



Taking ispiration from earlier experiments in compliant auxetic structures, the mechanism is pieced together from simple 3D printed pieces and rubber strips for the hinges. A planetary gear box amplifies the torque provided by a single lightweight RC-servo. [Video] Magnetic-latching prototype in the lab; eight boats latched together.
--
Supervised by Daniela Rus (CSAIL), 2022.